 Robot
je stroj kojim se upravlja računalom. Oni postaju dio svakodnevnog života, na određeni način
predstavljaju vrhunac tehničkog dostignuća. U većini filmova i književnim djelima robota se
prikazuje
kao strojeve slične ljudima, zato ih svi smatraju sličnim ljudima.
Robot
je stroj kojim se upravlja računalom. Oni postaju dio svakodnevnog života, na određeni način
predstavljaju vrhunac tehničkog dostignuća. U većini filmova i književnim djelima robota se
prikazuje
kao strojeve slične ljudima, zato ih svi smatraju sličnim ljudima.
 Riječ robot prvi se puta spominje u književnom djelu Karela Čepeka "Rossumovi univerzální
roboti" 1920. godine. Upotrijebio ju je za čovjekolike strojeve koji obavljaju teške poslove.
Danas je tehnologija još naprednija pa postoji veliki broj oblika, veličina i vrsta robota.
Riječ robot prvi se puta spominje u književnom djelu Karela Čepeka "Rossumovi univerzální
roboti" 1920. godine. Upotrijebio ju je za čovjekolike strojeve koji obavljaju teške poslove.
Danas je tehnologija još naprednija pa postoji veliki broj oblika, veličina i vrsta robota.
 Nastanak robota temelji se na mnogim tehničkim i znanstvenim dostignućima, a razvojem robota bavi se
robotika.
Dakle, robotika je grana kibernetike koja se bavi projektiranjem, izradbom i uporabom robota.
Nastanak robota temelji se na mnogim tehničkim i znanstvenim dostignućima, a razvojem robota bavi se
robotika.
Dakle, robotika je grana kibernetike koja se bavi projektiranjem, izradbom i uporabom robota.
 U robotici se primjenjuju znanja iz različitih područja poput elektrotehnike, elektronike,
strojarstva, informatike,
tehnologije materijala, zatim fizike, kemije, biologije, medicine i drugih. Zato se za robotiku kaže
da je interdisciplinarna.
U robotici se primjenjuju znanja iz različitih područja poput elektrotehnike, elektronike,
strojarstva, informatike,
tehnologije materijala, zatim fizike, kemije, biologije, medicine i drugih. Zato se za robotiku kaže
da je interdisciplinarna.
 U mnogim industrijskim robotima ćemo pronaći dijelove koji nalikuju građi čovjekova tijela
(kostura). Isto tako veze
između pojedinih dijelova koji čine mehanizam robota, nalikuju "vezama" u ljudskom tijelu.
U mnogim industrijskim robotima ćemo pronaći dijelove koji nalikuju građi čovjekova tijela
(kostura). Isto tako veze
između pojedinih dijelova koji čine mehanizam robota, nalikuju "vezama" u ljudskom tijelu.
Čovjekova ruka se sastoji od više dijelova povezanih zglobovima. Npr. nadlaktica i podlaktica su
povezane ramenom i laktom.
Slično je i kod robota - dva međusobno povezana dijela koja kod robota omogućuju gibanje
nazivaju se kinematičkim parom.
Kinematički lanac je niz međusobno povezanih kinematičkih parova.
Zglobovi robota (isto kao i čovjeka) omogućuju okretanje u različitim pravcima.
 Broj slobodnih, mogućih nezavisnih okretanja kod robota naziva se stupanj slobode.
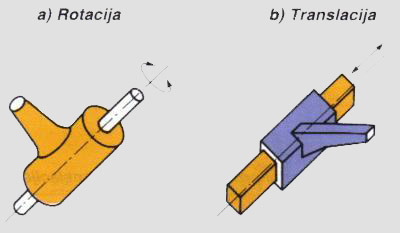
Translacija je takvo gibanje kada se dva dijela robota
međusobno povezana gibaju tako da jedan ulazi u drugi.
Rotacija je takvo gibanje ako se oko zajedničkog zgloba
dijelovi okreću.
Broj slobodnih, mogućih nezavisnih okretanja kod robota naziva se stupanj slobode.
Translacija je takvo gibanje kada se dva dijela robota
međusobno povezana gibaju tako da jedan ulazi u drugi.
Rotacija je takvo gibanje ako se oko zajedničkog zgloba
dijelovi okreću.
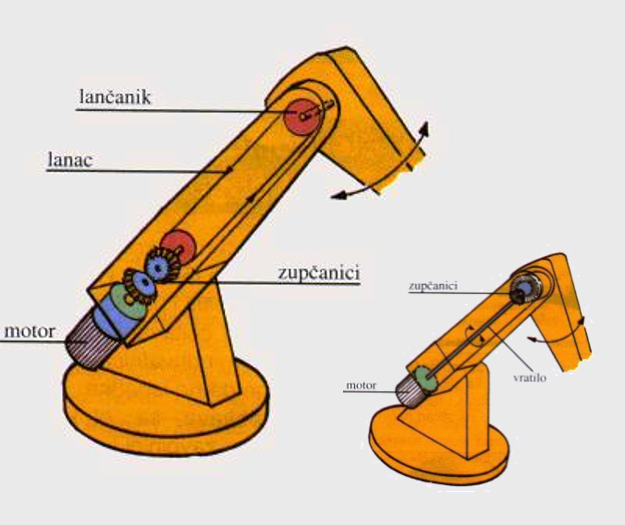
Vrste prijenosa gibanja:
1. posredan prijenos (kada su vratila međusobno
udaljena):
a) REMENSKI PRIJENOS - ostvaruje se pomoću dviju remenica i remena koji ih povezuje
b) PRIJENOS LANCEM - ostvaruje se pomoću dva lančanika i lanca koji ih povezuje.
2. izravan prijenos - kada su na vratila pričvršćeni
zupčanici koji se dodiruju i na taj način izravno prenose snagu motora (PRIJENOS ZUPČANICIMA i
PRIJENOS TARENICAMA).
Tarni prijenos se ne upotrebljava kod robota jer pri većim opterećenjima može doći do
proklizavanja.